








HF2160-1A-12DE 4-контактное реле 30A
₽.98.58
₽.109.87
Динамическая ошибка: 2,5 °
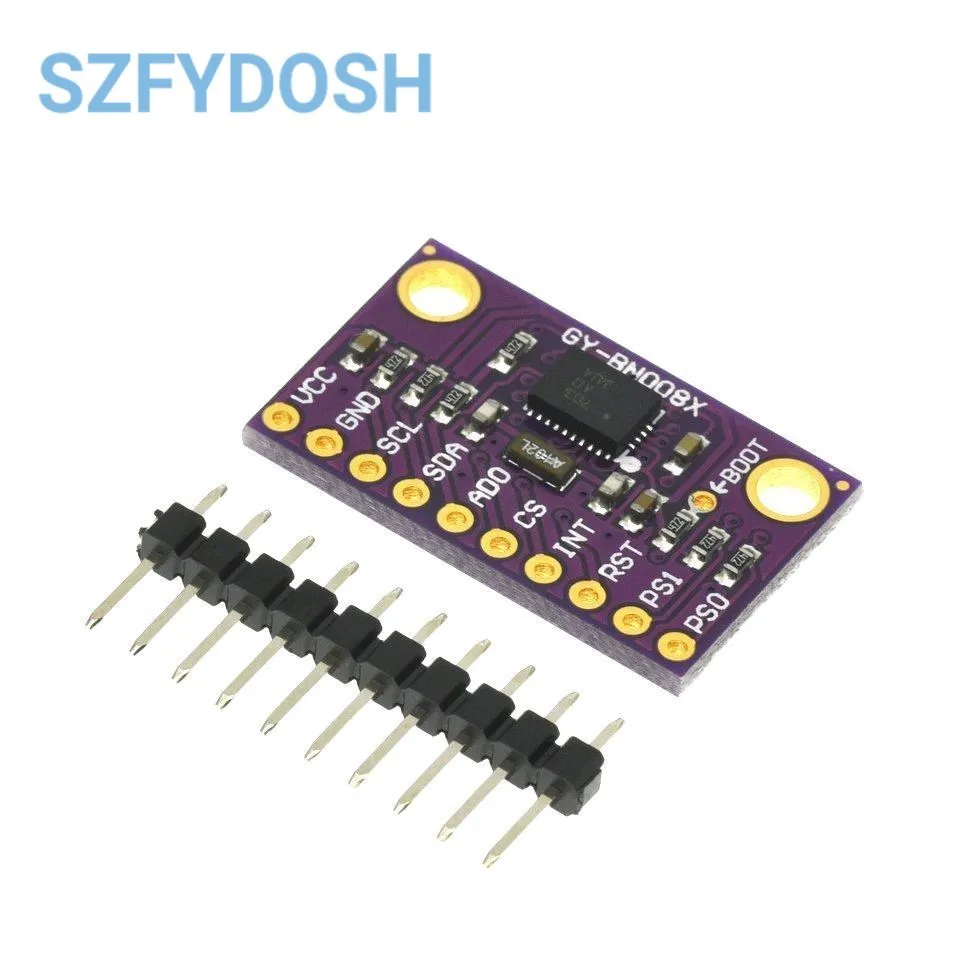
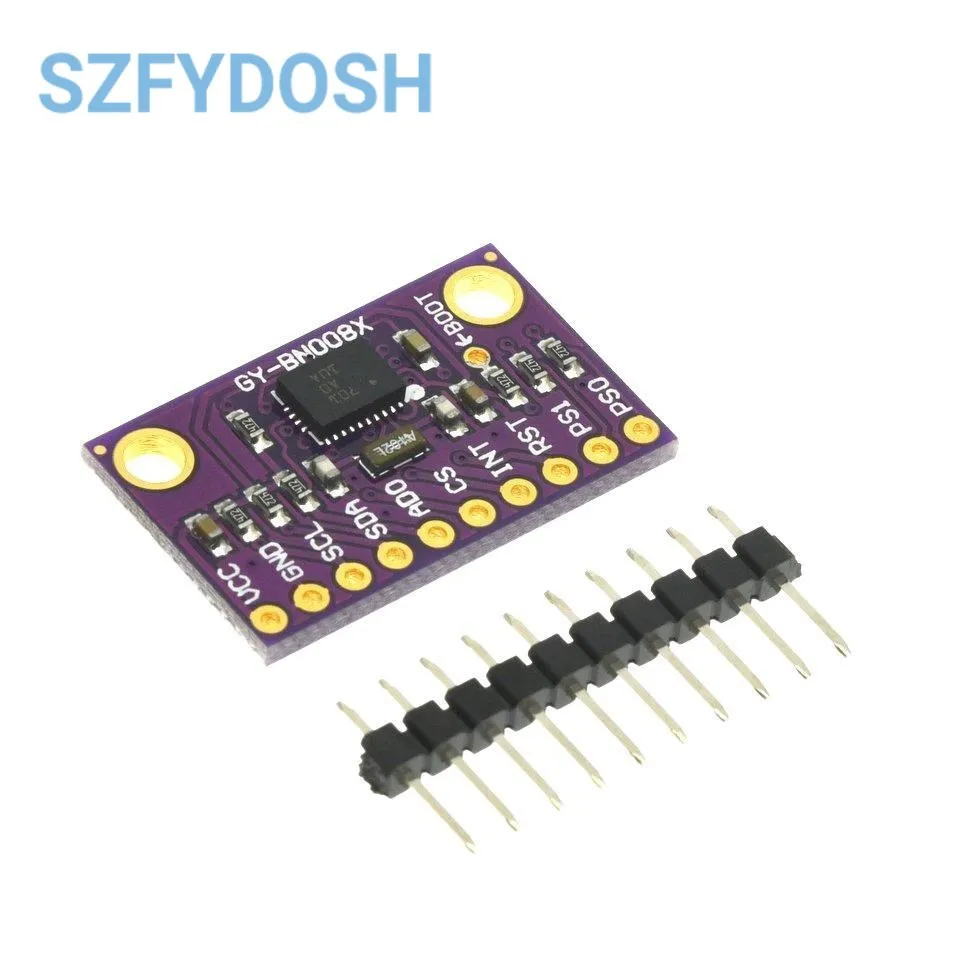
32-разрядные микроконтроллеры ARM Cortex M0 + с низким энергопотреблением, оснащенные высокопроизводительными акселерометрами, магнитометрами и гироскопами, поставляются в небольшом корпусе.
Статическая ошибка: 2,0 °
Вектор геомагнитного вращения
Статическая ошибка: 1,5 °
Точность акселерометра: 0,3 м / с2
Игровой вектор вращения
SPI: до 3 МГц
Вектор вращения
I2C (по умолчанию): до 400 кГц
UART: 3 Мбит/с
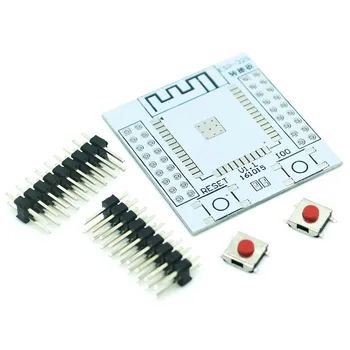
BNO080 может взаимодействовать через множество интерфейсов.Qwiic VR IMU оснащен двумя перемычками, которые позволяют пользователю выбирать нужный интерфейс.
Рабочие характеристики:
UART-RVC (роботы-пылесосы): 115200 Кбит/с
Динамическая ошибка: 3,5 °
Точность магнитометра: 1,4 мкТл
Интерфейсы:
Погрешность угла тяжести: 1,5 °
BNO080 / 085 - это 9-осевая встроенная система (SiP), которая позволяет быстро разрабатывать сенсорные устройства дополненной реальности (AR), виртуальной реальности (VR), робототехники и Интернета вещей.
Введение продукта:
Смещение курса: 0,5 ° / мин
Точность гироскопа: 3,1 ° / сек.
Погрешность динамического поворота: 4,5 °
Погрешность статического поворота: 3,0 °
Точность линейного ускорения: 0,35 м / с2